Maybe Snap is on to something?
Because Perseverance sure is putting the concept of a drone selfie in the headlines as NASA’s Mars’ rover sends back its first picture of itself using its WATSON (Wide Angle Topographic Sensor for Operations and eNgineering) camera on the SHERLOC (Scanning Habitable Environments with Raman and Luminescence for Organics and Chemicals). The picture was the combination of 62 of the images taken by this device that were then stitched together to form a coherent whole.
As NASA writes on its blog:
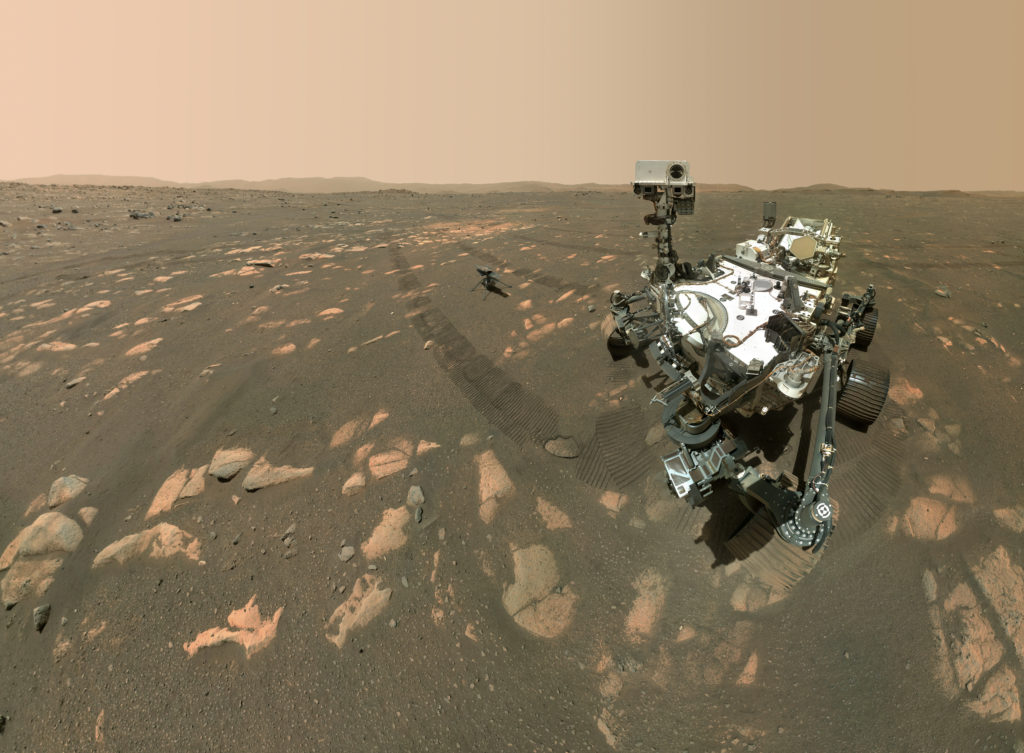
“NASA’s Perseverance Mars rover took a selfie with the Ingenuity helicopter, seen here about 13 feet (3.9 meters) from the rover in this image taken April 6, 2021, the 46th Martian day, or sol, of the mission by the WATSON (Wide Angle Topographic Sensor for Operations and eNgineering) camera on the SHERLOC (Scanning Habitable Environments with Raman and Luminescence for Organics and Chemicals) instrument, located at the end of the rover's long robotic arm.
Perseverance’s selfie with Ingenuity is made up of 62 individual images stitched together once they are sent back to Earth; they were taken in sequence while the rover was looking at the helicopter, then again while it was looking at the WATSON camera.”
Describing the camera on its robotic arm as a kind of selfie stick, NASA actually goes into some detail about how the rover takes these pictures in a post at this link.
As we’ve covered here, pictures of Mars never get dull in either our community or elsewhere. Whether it’s an observatory in France, or Japan’s plans on sending an 8K camera to the Red Planet, we’re more than interested in seeing what’s going on over at our nearest solar neighbor’s house.
What do you think of the Perseverance rover’s selfies? Have you kept up with the latest Mars mission? Let us know your thoughts on NASA’s latest work in the comments below.
Don’t forget to check out some of our other photography news on Light Stalking at this link right here.
[NASA]





{kind=link}